Tracking System for Satellite Ground Station
The Queen’s Space Engineering Team (QSET) is designing a 3U CubeSat for launch. APSC 103 students worked along side the Communications Team, responsible for maintaining radio communication with the satellite, to build a ground station. The students created a pointing system, keeping the antenna on the ground station fixed on the position of the CubeSat as it passes overhead during its orbit. The pass only lasts for about 12 minutes from horizon to horizon.
The students’ contribution enabled the Queen’s Space Engineering Team to maintain reliable communications between the satellite and the ground operator. This is vital to the success of QSET’s project as the satellite is only useful with a functioning communications system.
Specific parameters were outlined to be followed, such as: the pointing station must be able to turn at an absolute minimum rate of 1 degree per second in each elevation and azimuth, with a maximum combined error of 5 degrees. It must cover 0 to 90 deg in elevation, and 0 to 360 deg in azimuth. To predict where to point, the system must read from a .tle file and then use the station’s coordinates to calculate the pass trajectory. The operator must be able to interface with the station in real time via a computer to read out the pointing, and issue start/stop commands.
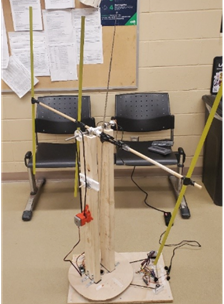
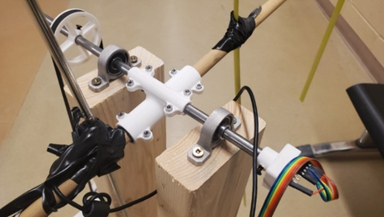
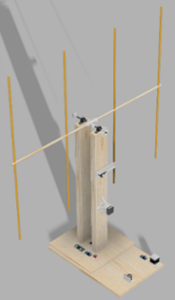
The students constructed a functional pointing mechanism prototype, as well as 3D CAD models, technical drawings, wiring charts, and script to run the prototype. Three design solutions were developed and evaluated in a decision matrix. The evaluation criteria include precision, speed control, stability, cost, safety, and organization. The proposed system consists of a wooden base with a turntable atop it. Two towers built on the turntable to support the antenna. The turntable and antenna were rotated with two NEMA stepper motors where one controlled the azimuth and other the elevation. To create smoother motion, a large bearing was used to mount the turntable. A slip ring was implemented in the centre to prevent wires from tangling. A Raspberry Pi served as the central hub, while a closed-loop PI controller regulated each motor using sensor feedback from a magnetometer that referenced the azimuth and the accelerometer referenced the elevation.